モータドライバ
モータを動かすためには大きな電流を必要とします。モータドライバICを使うことで簡単にモータを制御することができます。写真に写っているICが100kinSATのモータドライバIC(TB6612FNG)です。
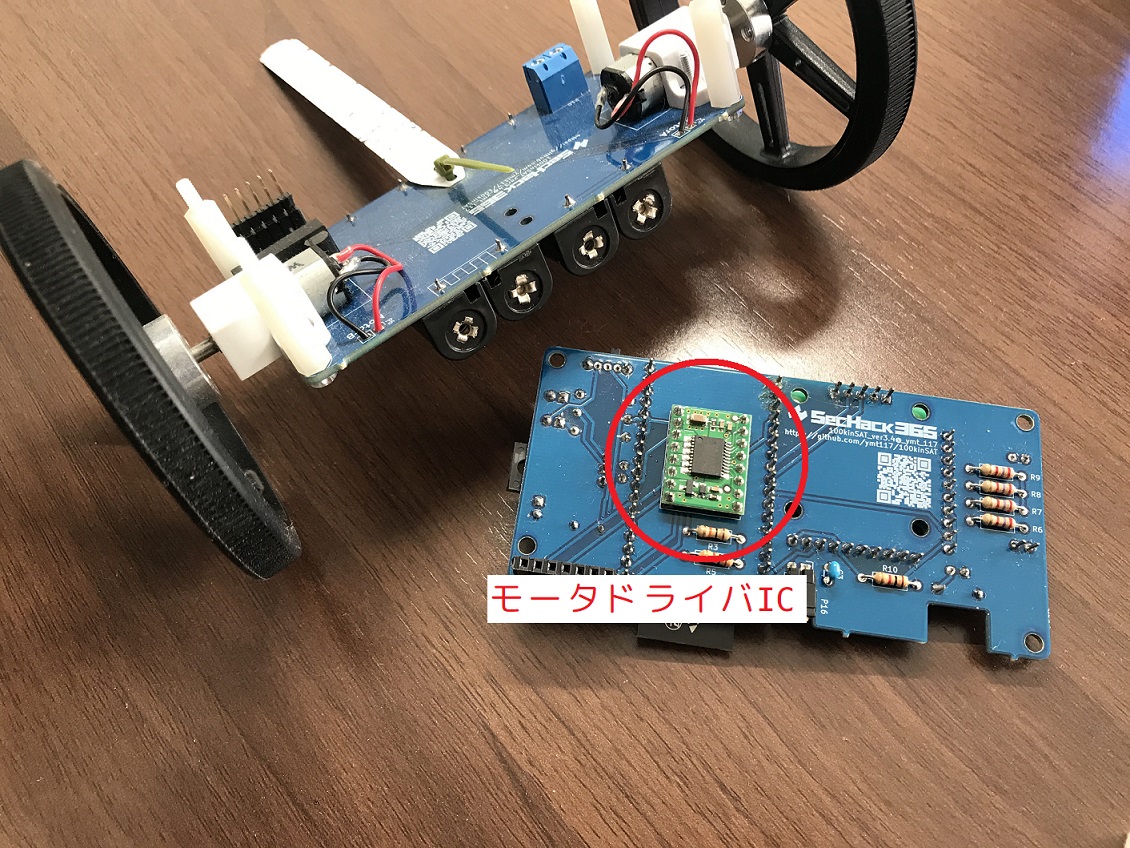 モータドライバIC
モータドライバIC
TB6612FNGは1つのICで2つのモータを制御することができます。
モータの制御
マイコンのGPIOピン3つ(IN1、IN2、PWM)で1つのモータを制御します。IN1とIN2のHIGHとLOWの組み合わせでモータの正転と逆転、ストップ、ブレーキを操作できます。PWMは0~255までの値を指定し、モータの回転速度の強弱を制御することができます。Arduino UNOではanalogWrite()関数を使用することができますが、ESP32ではLEDC機能を利用することでanalogWrite()と同様の機能を使うことができます。各ピンの入力によるモータの出力の関係は表のとおりです。
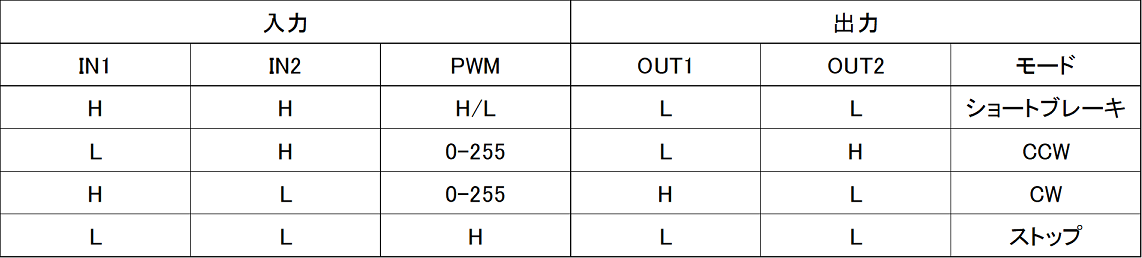 モータへの入力と出力の関係
モータへの入力と出力の関係
では、モータを動かしてみましょう。
モータ用のプログラムはmotor1.inoを使います。
ソースコードの説明
モータ制御ピンの設定
1
2
const int motorA[3] = {4, 13, 25}; // AIN1, AIN2, PWMA
const int motorB[3] = {14, 27, 26}; // BIN1, BIN2, PWMB
ここではモータの制御に使用するGPIOピンを配列に格納しています。
1
2
3
4
5
6
7
8
void setup() {
for(int i = 0; i < 3; i++){
pinMode(motorA[i], OUTPUT);
pinMode(motorB[i], OUTPUT);
}
// 省略
}
次にsetup関数内でモータ制御に使用するピンを「出力」に設定します。
配列を利用することで「for文」により一括で設定を行うことができます。
LEDCの設定
次にLEDCの設定について説明します。
1
2
3
4
5
const int CHANNEL_A = 0;
const int CHANNEL_B = 1;
const int LEDC_TIMER_BIT = 8;
const int LEDC_BASE_FREQ = 490;
最初にチャンネルや周波数、分解能をグローバル変数に定義しています。
今回はモータを2つ動かすため、CHANNEL_AとCHANNEL_Bの2つのチャンネルを使用します。
分解能を8ビットに指定したので、PWMは0~255(2^8)の範囲で指定できます。
1
2
3
4
5
6
7
8
9
void setup() {
// 省略
ledcSetup(CHANNEL_A, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcSetup(CHANNEL_B, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcAttachPin(motorA[2], CHANNEL_A);
ledcAttachPin(motorB[2], CHANNEL_B);
}
setup関数内ではLEDC機能を設定します。
設定にはledcSetup関数を使用します。
1
ledcSetup(channel, freq, resolution)
引数にチャンネル、周波数、分解能を指定します。
次にledcAttachPin関数を使用してPWM信号を出力するピンとチャンネルを結びつけます。
loop関数
最後にloop関数内でモータを動かしているプログラムの説明を行います。
1
2
3
4
5
6
7
8
9
10
// 前進
// 左モータ(CCW、反時計回り)
digitalWrite(motorA[1], LOW);
digitalWrite(motorA[0], HIGH);
ledcWrite(CHANNEL_A, 80);
// 右モータ(CW、時計回り)
digitalWrite(motorB[1], LOW);
digitalWrite(motorB[0], HIGH);
ledcWrite(CHANNEL_B, 80);
digitalWrite関数でピンの出力を「LOW」または「HIGH」にしています。この組み合わせにより、モータの正回転、逆回転を制御することができます。 CCWはCounterClockWiseを意味します。
PWMの出力にはledcWrite関数を使用します。第1引数に出力するピンのチャンネルを指定し、第2引数にPWM値を指定しています。第2引数には0~255の値を指定することができます。
PWM値を変化させることでモータの回転速度が変化するので、いろいろな値を入力して動作を確認してください。